
ARCS6 for WebVR
(under development)
Robot control framework for real-time control
Explore in the virtual world / Implement in the real world.
What is ARCS6 for WebVR?
ARCS6 for WebVR is a virtual reality (VR) content that allows you to easily experience robot control programming in the virtual world. It runs on a web page and is ready to use without any installation or setup. You can implement your robot control program in the real world using ARCS6.
What is ARCS6?
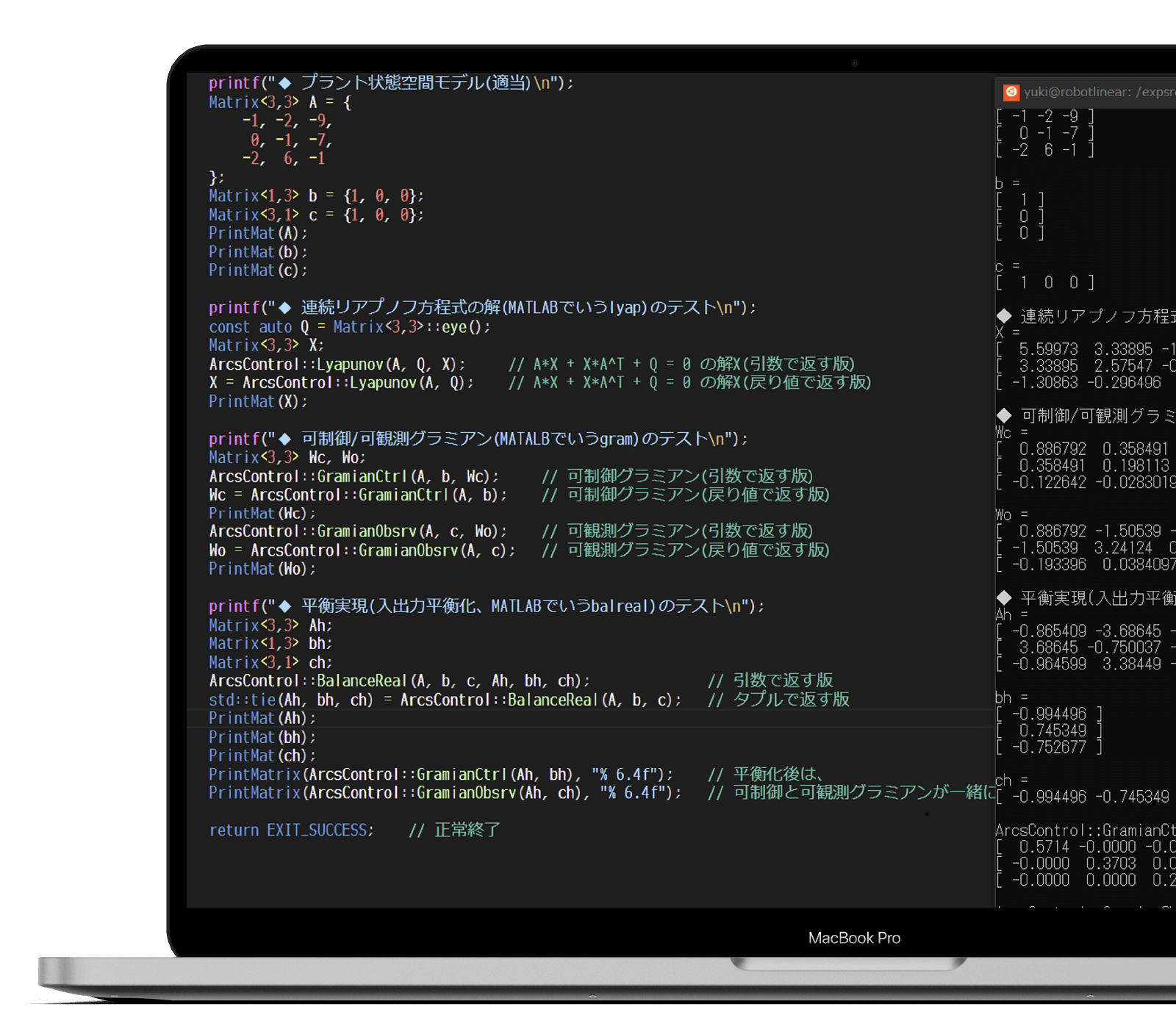
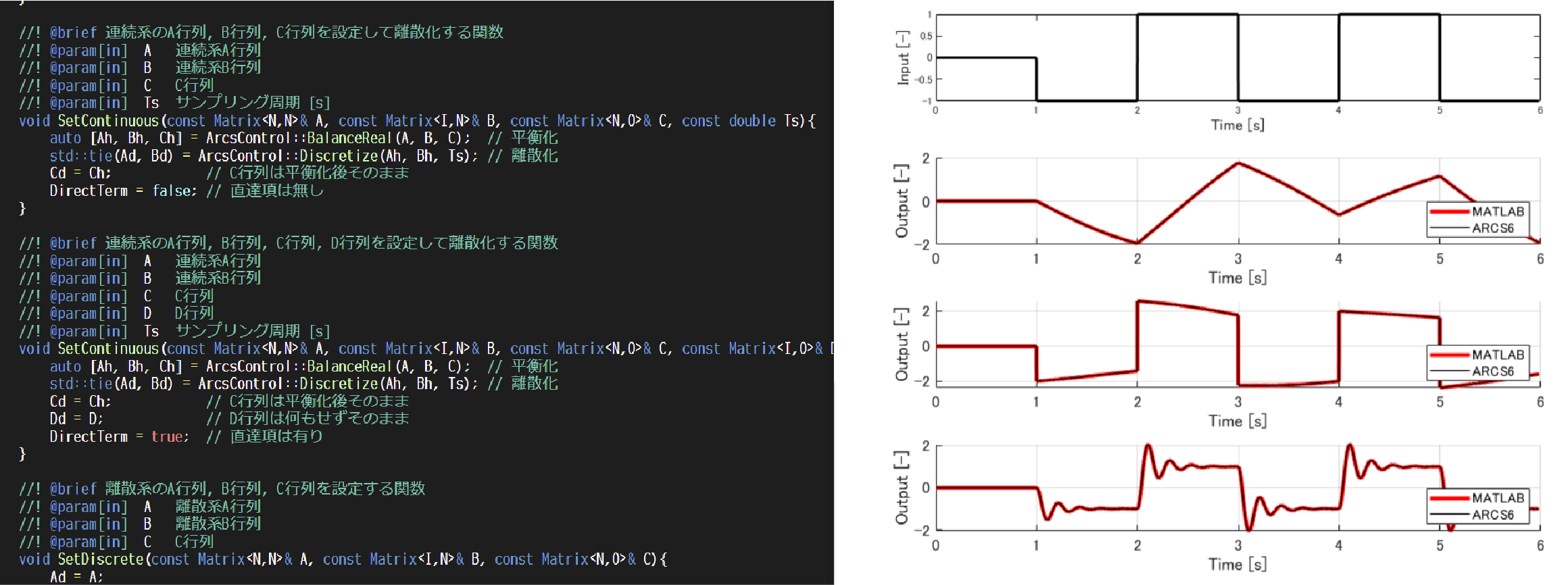
ARCS6 is a robot control framework specialized for motion control. It works on non-real-time Linux but allows real-time control.
ARCS6
The greatest feature of ARCS6 is that real-time control is possible on a general-purpose Linux OS such as AlmaLinux. It does not require patches to the Linux kernel like Xenomai or RT-Preempt. Eliminating patches allows real-time control code to run on a well-tested and reliable kernel.
Topics
Developer

Nagaoka University of Technology
Associate Professor
Dr. Yokokura Yuki
Yuki Yokokura received the B.E. and M.E. degrees in electrical engineering from the Nagaoka University of Technology, Nagaoka, Japan, in 2007 and 2009, respectively, and the Ph.D. degree in integrated design engineering from Keio University, Yokohama, Japan, in 2011. He was a Visiting Fellow with Keio University, and a Postdoctoral Fellow with Nagaoka University of Technology in 2011. Dr. Yokokura was a Japan Society for the Promotion of Science Research Fellow from 2010 to 2011. He was an Assistant Professor with Nagaoka University of Technology from 2012 to 2020, and he has been an Associate Professor in 2020.